NameNode的工作机制
工作机制
NameNode中元数据的存储介质?
磁盘?内存?
如果存储在NameNode节点的磁盘中,因为经常需要进行随机访问,还有响应客戶请求,必然是效率过低。因此,元数据需要存放在内存中。但如果只存在内存中,一旦断电,元数据丢失,整个集群就无法工作了。因此产生在磁盘中备份元数据的FsImage。
这样又会带来新的问题,当在内存中的元数据更新时,如果更新FsImage,就会导致效率过低,但如 果不更新,就会发生一致性问题,一旦NameNode节点断电,就会产生数据丢失。因此,引入Edits文 件(只进行追加操作,效率高)。每当元数据有更新或者添加元数据时,修改内存中的元数据并追加到 Edits中。这样,一旦NameNode节点断电,可以通过FsImage和Edits的合并,合成元数据。
但是,如果⻓时间添加到Edits中,会导致该文件数据过大,效率降低,而且一旦断电,恢复元数据需要的时间很⻓。因此,需要定期进行FsImage和Edits的合并,如果这个操作由NameNode节点完成,又回效率过低。因此引入一个新的节点SecondearyNamenode,专⻔用于FsImage和Edits的合并。
Fsimage:NameNode内存中元数据序列化后形成的文件。
Edits:记录客戶端更新元数据信息的每一步操作(可通过Edits运算出元数据)。
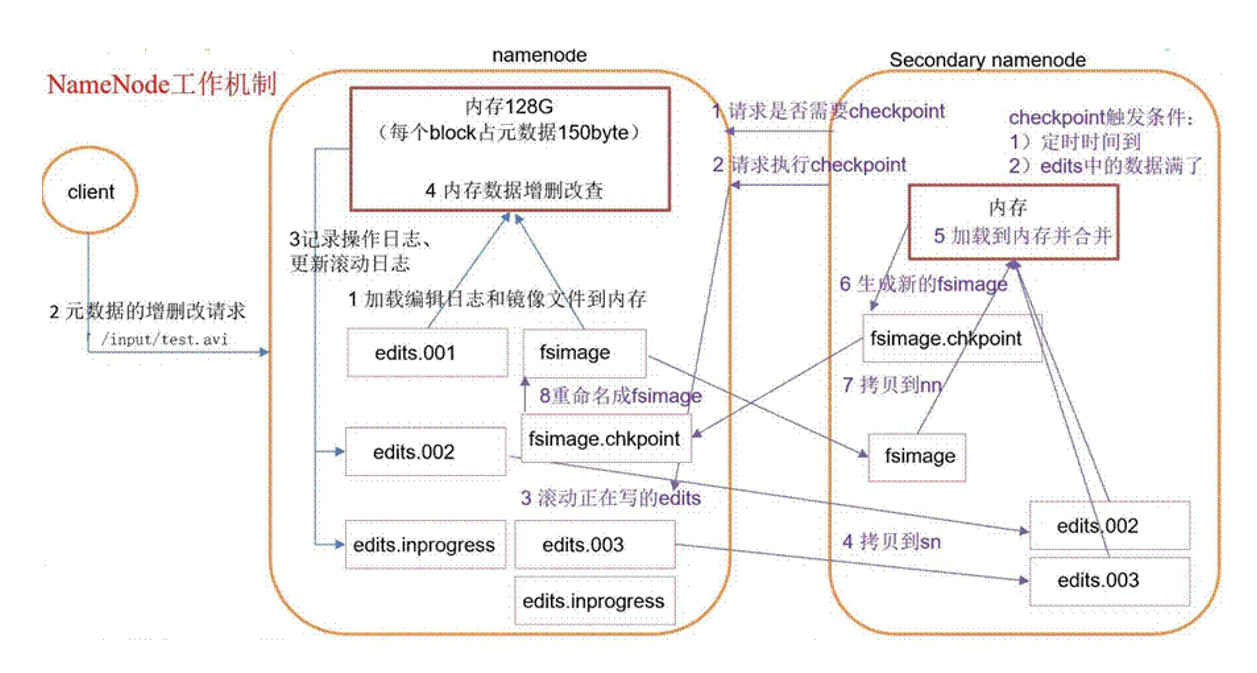
第一阶段:NameNode启动
- 第一次启动NameNode格式化后,创建Fsimage和Edits文件。如果不是第一次启动,直接加载编辑日志和镜像文件到内存。
- 客戶端对元数据进行增删改的请求。
- NameNode记录操作日志,更新滚动日志。
- NameNode在内存中对元数据进行增删改。
第二阶段:SecondaryNameNode工作
- SecondaryNameNode询问NameNode是否需要CheckPoint。直接带回NameNode是否检查结果。
- SecondaryNameNode请求执行CheckPoint。
- NameNode滚动正在写的Edits日志。
- 将滚动前的编辑日志和镜像文件拷⻉到SecondaryNameNode。
- SecondaryNameNode加载编辑日志和镜像文件到内存,并合并。
- 生成新的镜像文件fsimage.chkpoint。
- 拷⻉fsimage.chkpoint到NameNode。
- NameNode将fsimage.chkpoint重新命名成fsimage。
FsImage和Edits解析

Fsimage文件:HDFS文件系统元数据的一个永久性的检查点,其中包含HDFS文件系统的所有目录和文件inode的序列化信息。
Edits文件:存放HDFS文件系统的所有更新的路径,文件系统客戶端执行的所有写操作首先会被记录到Edits文件中。
seen_txid文件保存的是一个数字,就是最后一个edits_的数字
每次NameNode启动的时候都会将Fsimage文件读入内存,加载Edits里面的更新操作,保证内存中的元数据信息是最新的、同步的,可以看成NameNode启动的时候就将Fsimage和Edits文件进行了合并。
查看fsimage
查看edits
DataNode
DataNode机制:
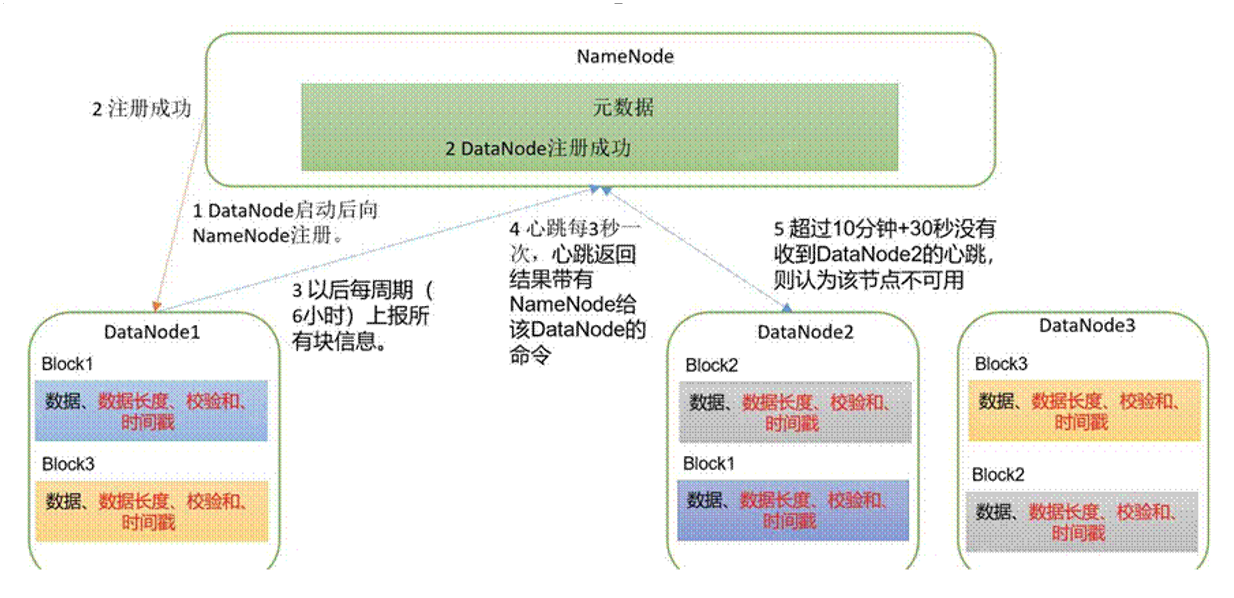
- 一个数据块在DataNode上以文件形式存储在磁盘上,包括两个文件,一个是数据本身,一个是元数据包括数据块的⻓度,块数据的校验和,以及时间戳。
- DataNode启动后向NameNode注册,通过后,周期性的向NameNode上报所有的块信息。
- 心跳是每 3 秒一次,心跳返回结果带有NameNode给该DataNode的命令如复制块数据到另一台机器,或删除某个数据块。如果超过 10 分钟没有收到某个DataNode的心跳,则认为该节点不可用。
- 集群运行中可以安全加入和退出一些机器。
数据完整性
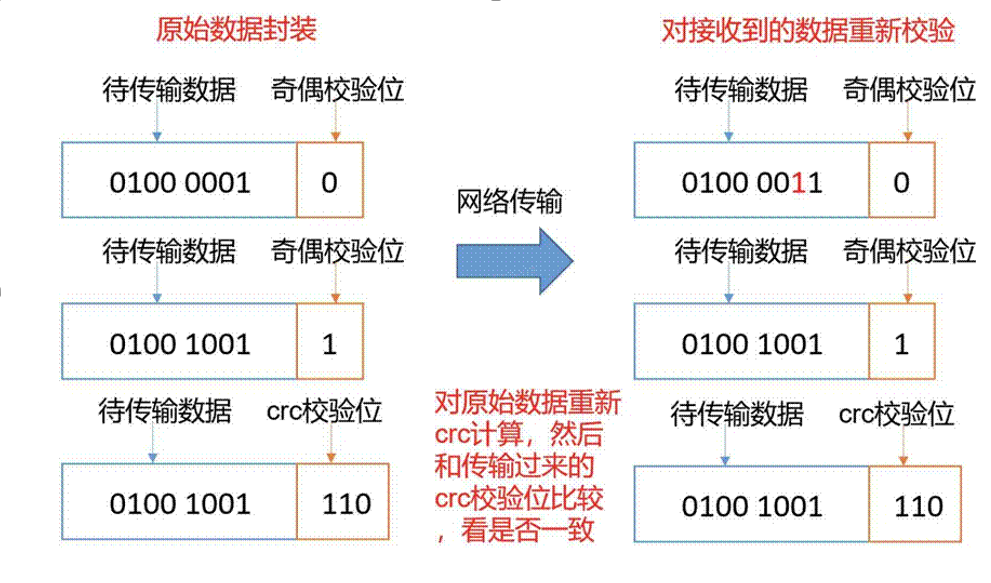
思考:如果电脑磁盘里面存储的数据是控制信号灯的红灯信号( 1 )和绿灯信号( 0 ),但是存储该数据的磁盘坏了,一直显示是绿灯,是否很危险?同理DataNode节点上的数据损坏了,却没有发现,是否也很危险,那么如何解决呢?如下是DataNode节点保证数据完整性的方法。
- 当DataNode读取Block的时候,它会计算CheckSum。
- 如果计算后的CheckSum,与Block创建时值不一样,说明Block已经损坏。
- Client读取其他DataNode上的Block。
- 常⻅的校验算法crc( 32 ),md5( 128 ),sha1( 160 )
- DataNode在其文件创建后周期验证CheckSum。